-- Les NeWs --
Le site démenage le 16/10/2008 à 00h19
La sophia Team est fière de vous annoncer l'ouverture de son nouveau site à l'adresse suivante :
http://sophia-team.polytechnice.fr
J - 15 le 17/04/2008 à 10h28
Quelques petites nouvelles de la sophia team.
Malheureusement, les dieux grecs ne sont pas avec nous. Certaines partie du robot, comme le disque dur ssd , nous ont soudainement lachés.
Ce qui nous a fait perdre un peu de temps sur la réalisation mais le robot est quasiment finie.
Espérons que les choses évoluent dans le bon sens pour que la coupe se passe dans les meilleurs conditions.
construction du robot le 08/03/2008 à 19h26
Voici la saga de la construction du robot !
En effet, suite à un problème avec Don Bosco, nous avons du réaliser la bête nous même, et réapprendre à nous servir d'un tournevis !
Malgres nos moyen rustiques, on est quand même arrivé à se débrouiller, pour faire un robot "made in scie sauteuse" !

Il est assez marrant de visualiser l'évolution entre le premier prototype et la version finale:

Il reste encore beaucoup de boulot, mais il a une tête de vainqueur!

On peut visualiser le système d'éjection des balles :
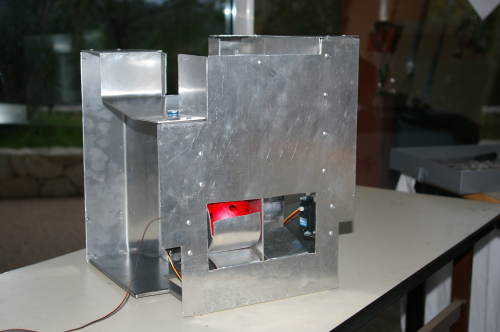
Trois jours de boulot = une grande avancée pour la partie méca !

Quelques nouvelles de la team ! le 12/02/2008 à 09h41
Hola hola !
Quelques news bien méritées de votre équipe favorite !!
Et oui, l'équipe ne se tourne pas les pouces, loin de la !
Alors voici quelques nouvelles de l'équipe et un bilan sur son avancement !
-Electronique: 95% !
Toutes les cartes électroniques sont conçues et réalisées.
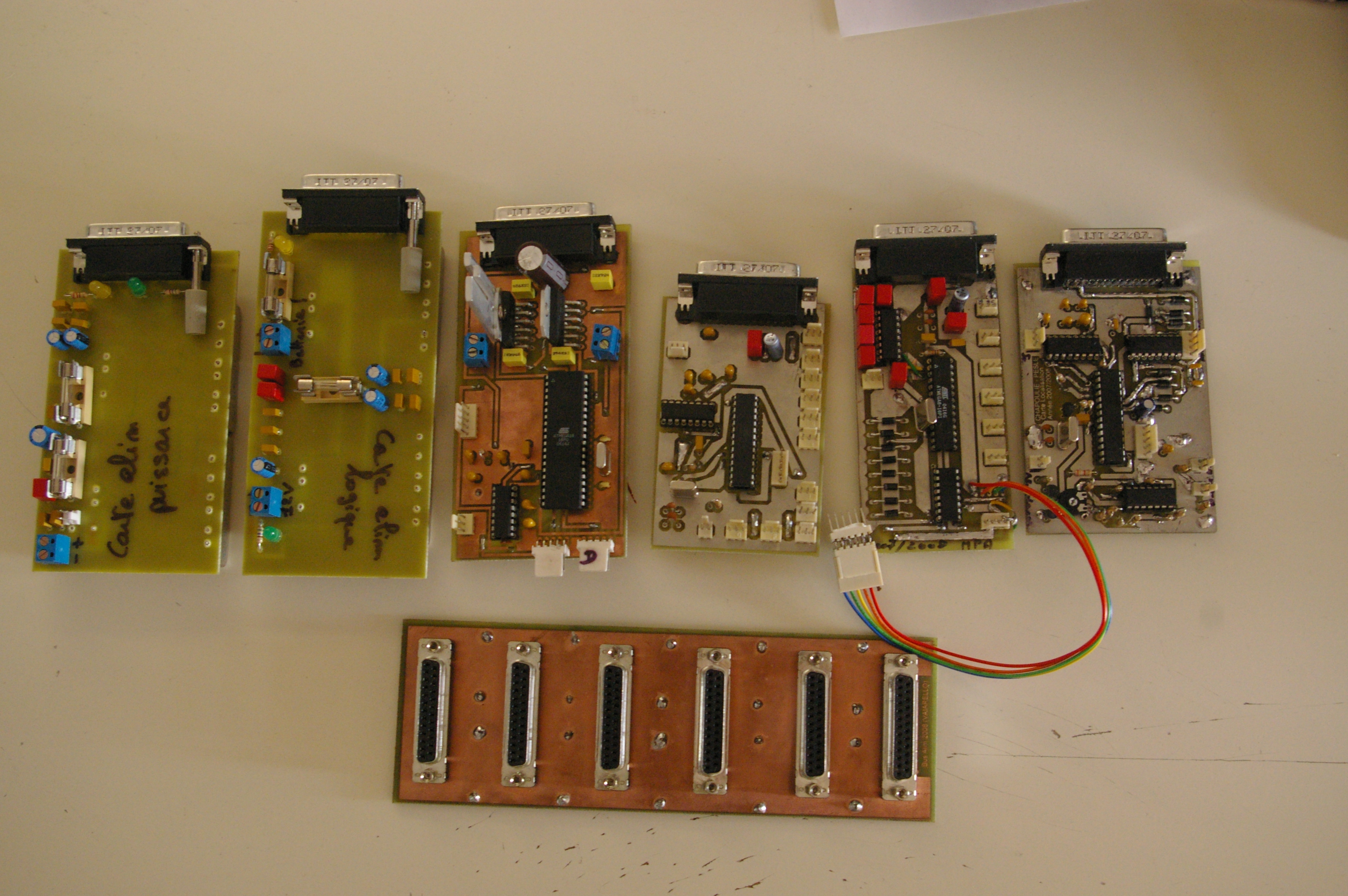
Cette année elles sont au nombre de 6, (de gauche à droite sur la photo)
-2 cartes alimentation : logique, et puissance
-carte asservissement
-carte capteurs
-carte actionneurs
-carte localisation de l'adversaire
On a pour objectif de ne pas avoir trop de fils, et on utilise donc un bus d'alim.
Chaque carte embarque un ATmega, qui contient le programme (sauf les 2 cartes alim, bien entendu).
On a décidé d'utiliser une architecture structurée : chaque carte ne parle qu'avec la carte mère, qui embarque l'intelligence centrale du robot.
voilà, les cartes sont donc en phase de test : debuggage des programmes embarqués, test de communication RS-232 avec les ordis, programmation et tests du programme d'asservissement, etc etc...
Il y a quelques modifications mineures à faire sur les circuits imprimés, puis on fera réaliser les cartes par une entreprise afin d'avoir des cartes propres, avec trous métallisés, vernis etc etc...
C'est pour dans pas longtemps, et on vous tiendra au courant !
-Mécanique :20%
Coté méca c'est l'attente.
Munck a entièrement modéliser le robot sous solidWorks, et notre partenaire, le lycée technique Don Bosco devrait nous livrer la carcasse pour les vacances.

On l'espère fermement, cela nous permettrait de faire les inévitables petites modifications, et de commencer l'intégration des moteurs, capteurs, de la carte mère, des cartes électroniques, etc etc.
Il y a du boulot pour tout faire rentrer !
-Informatique : 20%
Coté info, c'est la liesse !
Les 2 cartes mères mini-ITX commandées au état unis chez Global American sont arrivées !
Bourrées d'entrées-sorties, elle conviennent parfaitement à notre utilisation et pourront être utilisées plusieurs années de suite !
jugez par vous même :

processeur embarqué C7 1,5Ghz, 4 ports série, 1 port parallèle, 6 port USB, 1 fireWire, 1 socket pour compact-Flash, 2 connecteurs SATA, et 2 IDE.
La carte en détail, c'est ici !
Du lourd!
Une petite surprise tout de même : on a installé Ubuntu sur une compact Flash 8Go, et surprise ça rame ! Car même si la CF a des temps d'accès minime, il n'y a que très peu de débit.
On a donc fait les soldes et acheté .... un disque dur SSD de 32 Go !

Sinon coté prog, une grosse partie reste à faire, puisqu'il faut développer toute la stratégie du robot.
La reconnaissance des boules (qui est quand meme un sacré morceau avec sa reconnaissance de forme) avec la webcam marche, mais il faudra encore y consacrer du temps.
Sinon la partie communication (série) de la carte mère avec les cartes électroniques a été developpé.
Conclusion générale avant les vacances : il faut finir les tests des cartes elec, croiser les doigts pour qu'on ai la carcasse, puis se sera intégration, test et programmation !
BONNE ANNÉE le 30/12/2007 à 23h21
